발명의 명칭: 튜브형 삼상궤도 진공 자기부상 이동 시스템 Ⅱ
(The vacuum tube shuttle system with three phase magnetic levitation tracks)
발명의 설명
기 술 분 야
[0001] 본 발명은 속이 빈 주름관(corrugated tube)을 연접하여 다중으로 결합한 진공 선로튜브와 튜브셔틀(tube shuttle)로 대표되는 진공 자기부상 이동체 시스템에 관한 것이다.
[0002] 보다 구체적으로 본 발명은 양정현파 주름관의 주행튜브 7개를 연접한 다중 선로튜브를 안출하여 최소직경으로 체적대비 인장·비틀림·굽힘·압축 등 전단응력 증대와 튜브제작 재료비 절감 및 대규모 트래픽을 처리하는 다중튜브 구조물과 함께, 주행튜브 정삼각형 꼭짓점의 삼상궤도(3 phase track) 방식 자기부상 궤도와 실린더형 진공 자기부상 이동체인 튜브셔틀 시스템에 관한 것이다.
배 경 기 술
[0003] 현재 자기부상 열차 시스템은 수건의 실용화가 진행되고 있으며 시속 500km 수준의 주행속도를 달성하고 있으나 궤도 상태나 공기저항 등의 문제로 인하여 보다 초고속의 실현은 기술적으로 매우 어렵다.
[0004] 그 대안으로 궤도를 튜브 혹은 진공선로로 구축하여 음속을 돌파하려는 연구와 시도가 진행되고 있으나 여러 기술적 난제와 과도한 투자비 등으로 아이디어 수준이거나 초보적인 시험실 수준에 머물고 있다.
[0005] 종래 자기부상 열차와 음속돌파를 위한 진공튜브 자기부상 열차는 기존철도 시스템을 개선하여 바퀴의 마찰저항을 없애기 위해 이륜궤도와 단상 자기부상 기술을 적용함으로써, 음속돌파나 아음속과 같은 초고속 주행시 열차운행의 안정성이 떨어지고 자기부상과 열차운행 제어에 많은 어려움이 발생되고 있다.
[0006] 상기 단상궤도와 이륜바퀴에서 나타나는 정현파 형태의 사행동(蛇行動, snake motion, hunting)은 철도차량의 공진현상 중 하나로, 주로 직선부를 고속으로 주행할 경우 차체나 대차, 차축 등이 연직축 둘레방향 회전진동(yawing)을 일으키는 현상으로, 궤도나 대차·차체에 손상을 주며 정도가 심한 경우 탈선사고의 주된 원인이 되므로 고속화에서는 특히 이 현상에 대한 대책이 중요하다.
[0007] 일반적으로 이륜바퀴와 단상궤도는 고대의 수레 혹은 마차에서 연원한 기술적 사상으로 오랜 세월 기술개선으로 열차주행 속도를 꾸준히 증대하여 왔으나, 중력극복을 위한 경제적인 자기부상 기술의 적용이 어렵고 초고속 주행에 따른 공기저항의 극복이 지난하며 진동과 섭동 등의 다양한 문제점을 해결하지 못하여, 음속돌파와 같은 초고속 주행 시스템 적용은 근원적인 문제점을 내포하고 있어 초고속 주행 이동체 시스템은 새로운 기술방식이 필요하다.
[0008] 현재 실용화 혹은 개발 중인 자기부상열차는 일반 전자석을 사용한 상전도 흡인식의 시속 110km급 한국 도시형 자기부상 열차와 독일 기술인 상하이 트랜스래피드(Transrapid)가 실용노선에서 영업운전을 하고 있으며, 일본은 철도회사인 JR 도카이(東海)에서 초전도 반발식의 주오신칸센(中央新幹線)의 시험선을 개통하여 주행시험에서 최고속도 603Km를 기록하였고 설계 최고 속도 시속 505 km로 도쿄-나고야 노선을 2027년에 개업하고 도쿄-오사카 노선을 2045년 전 개업을 목표로 진행되고 있으나 모두 기존 철도기술의 연장선상에서 진행되고 있다.
[0009] 한편, 미국 엘론 머스크가 제안한 신개념 고속철도인 하이퍼루프(The Hyperloop)는 1920년대 제안된 ‘레일건’ 아이디어에서 제안된 프로젝트로 시속 1,280 km(마하 1.06)의 속도를 목표로 아진공 상태의 지름 3.3m 튜브와 28인승 캡슐 1량으로 구현할 계획으로, 하이퍼루프 프랜스포테이션 테크놀로지(HTT)와 하이퍼루프원(Hyperloop one) 등이 개발을 진행 중에 있으나 상용화는 불투명한 상태이며 동유럽 슬로바키아도 수도인 브라타슬라바-코시체 400km 구간에 하이퍼루프 도입을 검토하고 있다.
[0010] 하이퍼루프(Hyperloop)의 부상방식은 아진공 상태의 희박한 공기를 압축기와 팬으로 분사하는 공기 베어링(air bearings) 방식 또는 전자기장을 이용하는 자기부상 방식으로 영구자석의 자화방향을 다르게 배열하는 할박배열(Halbach arrays) 기술의 수동 자기부상 시스템인 인덕트랙(Inductrack)방식을 검토하고 있다.
[0011] 구체적으로, 할박배열 기술은 1극에 여러 편의 자석을 모으고 각각의 자석편이 모두 각기 90도 다른 방향으로 자화하는 형상을 갖는 것으로 초기상태에서 다소 높은 토크 특성을 갖고 있으나, 영구자석 자속(flux)의 정확한 방향과 배열의 제조공정이 매우 어렵고 동일 출력을 얻기 위해 평행착자(parallel magnetization) 영구자석 대비 두 배 이상의 체적이 필요하며 동손과 역기전력 파형인 고조파 왜율(歪率)이 증가하여 토크가 현저히 감소하는 감자(demagnetization) 특성 등이 열악한 구조적 문제를 내포하고 있다.
[0012] 할박배열 기술에 기초한 인덕트랙(Inductrack)방식은 열차 본체 하단에 자석을 배치하고 터널 안 트랙에 전력이 공급되는 와이어루프를 설치하여 부상력과 추력을 얻는 방법으로 공지되고 있으나, 아직도 레일건 적용이나 화학연료 연소로 추력을 얻는 로켓발사 부분에 대한 실용성도 검증되지 않고 있는 실정이다.
선행기술문헌
특허문헌
[0013] (특허문헌 0001) 대한민국 등록특허 10-1130807. 튜브철도시스템의 진공분할 관리 시스템 및 진공 차단막 장치(2009. 12. 17 출원)
(특허문헌 0002) 대한민국 등록특허 10-1034345. 반발부상 및 안내식 튜브 운송장치 (2008. 12. 31 출원)
(특허문헌 0003) 대한민국 등록특허 10-1015170. 튜브식 자기부상열차 (2008. 12. 30 출원)
(특허문헌 0004) US Patent 5,722,326. Magnetic levitation system for moving objects (1994. 8.1 출원)
(특허문헌 0005) US Patent 6,664,880. Inductrack magnet configuration (2001. 6. 29 출원)
(특허문헌 0006) US Patent 6,758,146. Laminated track design for Inductrack maglev systems (2002. 11.27 출원)
발명의 내용
해결하려는 과제
[0014] 본 발명의 목적은 종래 단상궤도와 이륜바퀴의 기존 철도기술에서 연원하는 단상궤도 자기부상 열차와 진공튜브 열차기술의 문제점을 해소할 수 있는 방안으로, 진공튜브 형상을 7개의 양정현파 주름관을 정육각형 각 변에 연접시킨 육방격자형 다중튜브 구조물과, 각 튜브내 정삼각형 꼭짓점에 삼상(3 phase) 자기부상 궤도(track)가 안치되는 것을 특징으로 하는 진공 자기부상 이동체 시스템을 제공하는데 있다.
[0015] 이는 튜브셔틀의 음속돌파와 아음속과 같은 초고속 운행의 안정성 확보와 진동과 섭동을 극소화하는 기술적 진보성을 갖게 되며, 양정현파 주름관의 7 개 중 다중튜브 솔루션 등으로 본 발명의 실시예인 심해구간의 높은 수압극복과 선로 비용의 최소화를 달성할 수 있어 막대한 투자비와 공사비가 필요한 자기부상 이동체 시스템의 경제성을 높일 수 있게 된다.
과제의 해결 수단
[0016] 본 발명은 우선 자기부상 이동체 선로로 쓰이는 튜브(주름관)의 물리적 형상과 디자인을 재료역학 이론에 준거하여 최적의 진공 자기부상 튜브 형상(태양)과 제조방법을 제공한다.
[0017] 본 발명의 음속돌파를 위한 진공 자기부상 이동체의 선로 구조물로 속이 빈 주름관(corrugated tube) 7개를 수평으로 정육각형 각 변에 연접시키는 다중튜브 디자인과 제작공법을 안출하여 튜브단면의 체적대비 집적도 향상과 인장, 비틀림, 굽힘, 압축 등 전단응력 증대 및 튜브제조의 간편성을 도모한다.
[0018] 본 발명에서는 재료역학적인 비틀림이나 굽힘 및 인장강도 등을 더욱 향상시키기 위해 삼각함수 파형인 정현파(sinusoidal, ∿)를 양의 영역으로 정류 혹은 전환(컨버트)한 양정현파(陽正弦波, positive sinusoidal, ◠◠◠) 형상 주름관을 채택하면 동일체적 대비 편평관(扁平管, flat tube, ◎)보다 월등한 인장, 비틀림, 굽힘, 압축 강도 특성을 갖게 한다.
[0019] 상기 양정현파 형상 주행튜브는 시루떡 형상 샌드위치보(sandwich beam)의 구조물로 전단응력τ을 크게 향상시키고, 자연재해인 지진발생시 P파(primary wave)와 S파(secondary wave) 및 표면파 등의 충격을 견디는 내진강도(耐震强度)를 갖게 되며, 체적대비 집적도 향상과 인장, 비틀림, 굽힘, 압축 등 전단응력의 증대 및 압출 성형 등 튜브제조의 간편성을 도모할 수 있게 된다.
[0020] 양정현파 형상 주행튜브는 진공 자기부상 이동체인 튜브셔틀의 음속돌파에 수반되는 진동이나 섭동 등의 불요파 에너지를 튜브와 대지로 환류(feedback) 시키는 한편 높은 수준의 내진강도와 면진(免震)이나 제진(制震)을 위한 5태양의 지진파흡수 시스템을 적용하여 빈발하고 있는 지진이나 쓰나미와 같은 자연재해로 부터 선로튜브를 보호하고 튜브셔틀 운영의 안정성을 확보하여야 한다.
[0021] 또한 궤도가 배치되는 주행튜브 형상은 x축 가로방향 2·3·2 구조로 하고 수평면에 정육각형 한 변이 배치되는 구조물로 연접튜브간 분기나 합류 선로구성시 수평방향의 스위칭회로 공간을 확보할 수 있는 구조를 채택함으로써 노선확장이나 노선간 상호접속시 스위칭 선로(회로) 구성이 용이해지는 이점이 있다.
[0022] 이와 함께 7 개 튜브 내부 정삼각형 꼭짓점 π/2, 7π/6, 11π/6에 안치되는 자기편의 프레임은 WF보(wide-flange beam)에 상응하는 구조물로 튜브내부에 형성되는 음정현파형 내벽에 WF보의 플랜지(flange)가 취부되고 웨브(web)와 또 다른 플랜지가 자기편의 프레임이 되는 구조를 갖는다. (상기 π/2, 7π/6, 11π/6 와 같이 라디안 값으로 위치를 나타낼 때, 엄밀하게는 튜브의 길이 방향에 수직인 단면에서의 점의 위치를 극좌표를 사용하여 나타낼 때 튜브의 반지름을 r이라고 할 때, (r, π/2), (r, 7π/6), (r, 11π/6)과 같이 극좌표 표시로 나타내어지는 튜브에 내접하는 정삼각형의 꼭짓점을 간단하게 라디안 값만 사용하여 나타내는 방법으로 이하에서 동일한 표기법을 사용하여 간단하게 표시하기로 한다.)
[0023] 이때, 주행튜브 내심의 2π/3 길이를 갖는 3개 WF보의 플랜지를 2π/3 위상(120도) 간격으로 배열하고 쐐기(wedge)로 주행튜브 내부에 취부하는 방법으로 조립하면 주행튜브를 한 겹 더 보강하는 샌드위치보의 효과로, 자기부상 이동체 운행에 따른 동역학적 응력을 선로튜브 전체면으로 분산시켜 인장·비틀림·굽힘·압축강도 향상으로 반복적인 하중을 받아 지속적으로 강도가 저하되어 발생하는 피로파괴(fatigue failure)를 예방할 수 있게 된다.
[0024] 바람직하게는 연속궤도보다 불연속(dashed) 궤도로 z축상에 구성함으로써 자재비 절감과 주행튜브의 진공상태유지에 필요한 격벽 설치공간을 확보하고, 튜브셔틀의 수치제어(numerical control: NC)와 인공지능(AI) 프로그램 등 디지털 방식 이동체 운행의 요소기술로 기능함이 필요하다.
[0025] 또한 주행튜브에 오목형(凹) 홈으로 구성되는 보조궤도(auxiliary track)를 마련하여 튜브셔틀의 볼록형(凸) 보조바퀴(auxiliary wheel)를 수납하는 기능으로 튜브 셔틀의 중력에 의한 마찰력으로 비상시와 저속운행 구간 및 정차와 같은 바퀴 내림 모드의 주행용 궤도로 활용할 수 있어야 한다.
[0026] 상기의 목표를 거양하는 제1태양의 대강은 양정현파(陽正弦波) 주름의 골과 마루가 세로방향(z축)인 속이 빈 주름관(corrugated tube)을 7개를 정육각형 각 변에 수평으로 연접시켜 집적한 후 연접된 튜브외피 부분을 속이 빈 편평관으로 둘러싸는 기본형 튜브와, 이를 양정현파 주름관으로 다시 보강하는 강화 튜브의 형상을 안출하여 다중샌드위치보(multiple sandwich beam, MSB)의 기능을 발현하는 구조물로 동일체적 대비 편평관(flat tube) 보다 월등한 인장·비틀림·굽힘·압축강도를 시현하는데 있다.
[0027] 본 발명은 또한 양정현파(陽正弦波, ◠◠◠) 주름관 내부를 초음속 혹은 아음속으로 주파하는 자기부상 이동체인 튜브셔틀(tube shuttle) 시스템에 관한 것으로 이동체 외부형상은 실린더형으로 구성하여 진공 혹은 아진공 및 해저구간의 높은 압력을 극복하는 내압성을 갖게 된다.
[0028] 또한, 양정현파 주름관 주행튜브의 자기편 철(凸)에 대응하여 튜브셔틀 본체에 매립형 전자기편 요(凹)를 구비하며 원형의 양정현파 주행튜브와 실린더형 음정현파 주름판(negative sinusoidal plates)을 갖는 튜브셔틀의 조합으로 전체 시스템의 체적을 최소화 혹은 생력화(省力化) 할 수 있는 수단을 포함한다.
[0029] 상기 튜브셔틀은 단독 혹은 군집형 운행이 가능하도록 설계되며 셔틀 본체에 매립형 전자기편 요(凹)를 정삼각형 꼭짓점 π/2, 7π/6, 11π/6에 안치함으로써 중력위치 에너지(gravitational potential energy)와 탄성위치에너지(elastic potential energy)를 튜브셔틀의 기하학적 중심점인 3차원 xyz축상의 가상원점 O(0, 0, 0)으로 이동시켜 계(system)의 안정평형(stable equilibrium)상태에서 튜브셔틀의 초음속 혹은 아음속의 초고속 운행이 담보되어야 한다.
[0030] 또한, 자기부상 이동체인 튜브셔틀은 선형스테핑모터(linear stepping motor, LSM) 구동방식을 채택함으로써 스위칭 주파수 제어에 준거한 셔틀운행의 디지털화 혹은 인공지능(AI)에 의한 자율주행(autonomous driving)이 가능토록하고, 바람직하게는 표준 이동체로 구성하여 진공튜브의 1m 단위 디지털 불연속 자기부상 궤도와 동기를 유지하며 스위칭 모드로 운행하는 시스템이 보다 효율적이다.
[0031] 한편, 비행기와 같이 튜브셔틀 하단에 보조바퀴(auxiliary wheel)를 구비하여 비상시나 출발·도착이나 여객·화물포트나 정비기지 등의 저속운행 구간이나 정차 시 바퀴내림 모드로 전환하여 제1 태양의 보조궤도에 마찰력으로 구동하는 ‘활주주행모드’ 기능과 전자기 견인편에 의한 선형스테핑모터(LSM) 구동을 병행하는 이중 주행모드 운용으로 부하 균등화(load balancing)를 도모하고 코깅토크를 저감시킬 필요가 있다.
[0032] 상기 목표를 거양하는 제2 태양의 대강은 실린더 형상의 선형스테핑모터(linear stepping motor, LSM)방식 자기부상 이동체인 튜브셔틀은 양정현파 주름관 주행튜브와 튜브셔틀의 정삼각형 꼭짓점(π/2, 7π/6, 11π/6)에 자기편 철(凸)과 전자기편 요(凹)가 위치하는 xyz축 원통 좌표계(cylindrical coordinate system)의 삼상궤도(3 phase track) 자기부상 기술방식이다.
[0033] 삼상궤도 자기부상 방식은 이동체의 무게 중심(center of gravity)과 모멘트 중심(center of moment)을 원통 실린더 형상인 튜브셔틀의 가상원점 O(0, 0, 0)으로 이동시켜 안정평형(stable equilibrium) 상태 주행이 가능하므로, 기존 단상궤도 자기부상 기술의 중립평형(neutral equilibrium)과 열차 주행시의 불안정 평형(unstable equilibrium) 문제를 해소하여 진동이나 섭동을 최소화할 수 있게 된다.
[0034] 본 발명의 또 다른 측면은 양정현파 주름관으로 구성되는 선로튜브를 적용하여 타 선로·튜브포트·화물포트 등 실제 산업상 적용시 필요한 튜브 네트워크 토폴로지(tube network topology)에 관하여 제1태양의 기본형 튜브를 응용하여 교차점(switching or routing node)의 선로튜브 설계와 노드설계 방법론을 안출한다.
[0035] 본 발명의 튜브셔틀 운행은 일 대 일 지점간 연결과 여객·화물 포트, 정비와 대기에 필요한 차량기지 및 다른 노선간 연결을 통한 다지점간 운행이 요구되므로 노선간 혹은 스위칭 노드간 접속과 연동을 위한 표준화가 필요하며 미래 확장성을 고려한 표준 접속로 모델이 요구된다.
[0036] 상기 표준 접속로 모델은 고속도로 인터체인지와 일반도로 로터리 형상의 설계개념을 궤도 트래픽에 적합하게 개선하여 도넛형 회전튜브와 교차형(交叉型)스위치(Cross over Switch, XoS)가 안치되는 스위칭튜브를 조합한 표준 접속로 모델을 안출하여 7 중 튜브의 상호분기와 접속을 무정차, 무대기로 설계하여 초고속 운행에 필요한 기능이 발현되도록 한다.
[0037] 본 발명의 기본적 실시예인 천해와 심해와 같은 해저지형이나 육상구간의 대심도 터널은 100년 이상의 트래픽 수요와 장기간 공기 및 미래 신교통 체계에 대한 비전이 요구되므로 접속·분기 구간은 기본적으로 4 방향 접속로를 구축하여 격자형(matrix, grid) 간선망의 백년대계를 위한 로드맵이 요구된다.
[0038] 본 발명은 또 튜브선로와 포트·역사와 같은 터미널 운영의 효율성 증대를 위해 일 태양의 양정현파 주름관 주행튜브의 집합체인 선로튜브를 이 태양의 튜브셔틀이 삼 태양의 본선·지선·튜브포트·화물포트 등으로 단독 혹은 군집셔틀로 편성하여 운행하는 방식이다.
[0039] 군집형태의 혼성 편성방식의 튜브셔틀 운행은 선형스테핑모터(LSM)에 인가하는 펄스개수를 함수로 제어하는 수치제어(numerical control; NC)에 기초한 디지털 관제가 필요하며, 표준화된 궤도와 튜브셔틀 길이 및 노선의 스위칭 방식에 대한 정교한 알고리듬이 필요하다.
[0040] 바람직하게는, 자기부상 이동체인 튜브셔틀은 15m 단위길이를 갖는 표준 이동체로 구성하고 주행튜브측 1m 단위 삼상궤도인 디지털 불연속 자기부상 궤도와 동기를 유지하는 스위칭 모드로 인공지능(AI)에 의한 자율주행(autonomous driving) 시스템이 바람직하다.
[0041] 본 발명은 또 상기 발명의 실시 양태들을 실용화할 때 튜브선로 시공방법으로 해상구간은 튜브부력을 고려한 튜브평형추 공법과 수중 튜브교각 및 튜브앵커 시스템과 함께 육상구간의 대심도 터널건설과 튜브포트 건설에 관한 것이다.
[0042] 비교적 수심이 얕은 연근해나 천해구간은 튜브 평형추와 수중 튜브교각 및 튜브앵커를 조합하며, 수심이 깊은 심해구간은 튜브앵커와 튜브 평형추를 혼용하여 경제성을 확보하는 시공법과 육상구간은 지하 100m 이상 대심도 터널을 건설하여 지장 장애물 없이 튜브선로를 시공하고 건설하는 방법을 안출한다.
[0043] 한편, 육상이나 해저 단층대 등에서 발생하는 지진파(P파, S파)의 충격을 흡수하거나 억제할 수 있는 지진파 흡수 시스템을 적용하여 빈발하고 있는 지진이나 쓰나미 등 자연재해로 부터 선로튜브를 보호하고 튜브셔틀 운영의 안정성을 확보하여야 한다.
[0044] 본 발명의 각 태양과 관련하여 위에서 설명한 특징이 본 발명의 각기 다른 태양에 동일하게 적용될 수 있다.
발명의 효과
[0045] 본 발명은 종래 2궤도 단상방식의 자기부상 열차나 진공 자기부상 열차기술의 문제점을 해소할 수 있는 방안으로서, 진공 혹은 아진공의 양정현파 주름관을 다중으로 연접한 주행튜브와 튜브 내벽 정삼각형 꼭짓점에 안치하는 삼상궤도를 초음속 혹은 아음속으로 주행하는 실린더 형상 선형스테핑모터(LSM)방식 튜브셔틀을, 중앙관제소의 인공지능(AI) 프로그램으로 자율주행을 제어하는 진공 자기부상 이동체 시스템을 제공한다.
[0046] 삼상궤도(3 phase track) 튜브선로와 이동체 시스템은 기존 2궤도 단상부상방식보다 √3배의 부상력과 견인력 및 내진동 특성을 갖게 되고 1/√3의 부상력과 견인력만으로 2 궤도 방식과 동일한 특성을 가지게 되며, 자기부상 이동체의 무게 중심(center of gravity)과 모멘트 중심(center of moment)의 벡터합력과 복원력을 xyz축의 가상원점 O(0, 0, 0)에 구속시켜 안정평형(stable equilibrium) 상태의 초고속 주행을 가능케 한다.
[0047] 또한, 양정현파(陽正弦波) 주름관의 7튜브(7 tube)는 동일체적에서 최대 주행공간을 확보할 수 있으며, 주행튜브의 정삼각형 꼭짓점에 안치되는 자기편은 튜브 내심 원호 길이를 갖는 3개 WF보 형상의 부재로 보강하여 다중샌드위치보(MSB)의 구조물로 동일체적 대비 편평관보다 월등한 인장, 비틀림, 굽힘, 압축 강도를 시현할 수 있게 된다.
도면의 간단한 설명
[0048] 도 1은 주행튜브 단면도이다.
도 2는 도 1의 주행튜브의 집합체인 7선로튜브의 단면도이다.
도 4는 도 2의 보조채움관 확대 단면도이다.
도 5는 주행튜브 삼상궤도 단면도이다.
도 6은 도 5에서 삼상궤도 A부분의 확대도이다.
도 7은 도 5에서 삼상궤도 A부분의 상세 사시도이다.
도 8은 디지털 불연속 궤도를 보여 준다.
도 9는 영구자석 자동체결의 형상을 보여 준다.
도 10은 자기편 프레임 형상과 영구자석 배치도이다.
도 11은 자기폐회로 구성도이다.
도 12는 보조궤도와 보조바퀴 단면도이다.
도 13은 보조 단상궤도 단면도이다.
도 14는 삼상궤도 프레임 결합 단면도이다.
도 15는 충전포스트 사시도이다.
도 16은 강화튜브 단면도이다.
도 17은 선로튜브간 접속부를 보여 준다.
도 18은 튜브댐퍼의 형상을 보여 준다.
도 19a는 튜브셔틀의 사시도이다.
도 19b는 튜브셔틀의 여객 측면도이다.
도 19c는 튜브셔틀 화물 측면도이다.
도 20은 튜브셔틀의 단면도이다.
도 21은 전자기뱅크의 단면도이다.
도 22는 전자기뱅크의 배열도이다.
도 23은 전자기날개의 형상을 보여 준다.
도 24는 반구형 해치부를 보여 준다.
도 25는 스위칭튜브 단면도이다.
도 26은 강화 스위칭튜브의 단면도이다.
도 27은 경사튜브의 형상을 보여 준다.
도 28은 1차 회전튜브의 구성도이다.
도 29는 2차 회전튜브의 구성도이다.
도 30은 대원 회전튜브의 구성도이다.
도 31은 원점회전튜브의 구성도이다.
도 32a는 교차형스위치(XoS)의 배치도와 동작도이다.
도 32b는 교차형스위치(XoS)의 동작모식도이다.
도 32c는 3단 교차형스위치(XoS)의 배치도와 동작도이다.
도 32d는 3단 교차형스위치(XoS)의 단면도와 확대도이다.
도 32e는 3단 교차형스위치(XoS)의 동작모식도이다.
도 33은 수직교차형 스위치(vXoS)의 동작모식도이다.
도 34a는 선로튜브의 진공차단벽 형상도이다.
도 34b는 인입구역 진공격벽과 진공챔버 형상도이다.
도 35는 튜브평형추의 형상을 보여 준다.
도 36은 튜브앵커의 형상을 보여 준다.
도 37은 수중 교각의 형상을 보여 준다.
도 38은 자세제어 튜브 시공선박 모식도이다.
도 39a는 튜브셔틀 플랫폼 단면도이다.
도 39b는 튜브셔틀 플랫폼 수평면 형상을 보여준다.
도 39c는 튜브셔틀 역사 형상을 보여준다.
발명을 실시하기 위한 구체적인 내용
[0049] 이하, 첨부 도면들을 참조하여 본 발명의 바람직한 실시예를 더욱 상세히 설명한다.
[0050] 도 1은 기본 주행튜브(10)의 단면도인데, 상기 주행 튜브는 바깥쪽 측면이 단면도를 기준으로 양정현파 형상의 주름(102)을 가지도록 하는 양정현파 주름관의 형태를 가지고 있다. 이는 재료역학적인 비틀림이나 굽힘강도의 향상과 주름(wrinkling)이나 축방향 변위(lateral displacement)인 좌굴(buckling)의 예방을 위해 삼각함수 파형인 정현파(sinusoidal, ∿)를 양의 영역으로 정류 혹은 전환(컨버트)한 양정현파(陽正弦波, positive sinusoidal, ◠◠◠) 주름관(corrugated tube)(101)으로 채택하여 내부공간을 최대화하고, 동일 체적 대비 편평관(扁平管, flat tube)보다 월등한 인장, 비틀림, 굽힘, 및 압축강도를 시현하기 위한 것이다.
[0051] 도 2는 상기 도 1의 기본 주행튜브(10)의 집합체인 선로튜브(11)의 단면도이다. 도 2에서 상기 기본 주행튜브(10)가 7개 모여 하나의 선로튜브(11)를 구성하고 있음을 볼 수 있다. 상기 선로튜브 (11)내에서 상기 기본 주행튜브(10)들은 서로 외접하며, 3개층으로 이루어지는데, 상층에 2개, 중층에 3개, 하층에 2개의 기본주행튜(10)가 배치되는 구조, 즉 2-3-2 구조를 가진다. 이것을 ‘7선로튜브’ 라고 부르기로 한다.
[0052] 삭제
[0053] 상기 7선로튜브에서 속이 빈 주름관을 7 개의 2-3-2 구조로 연접하여 적층시킨 후 상기 주행튜브(10) 외곽을 속이 빈 편평관을 사용하여 선로튜브 외피(15)로 다시 둘러싸는 구조를 형성하게 되며, 수압 등의 압축력에 의해 재료의 모든 부분에 압축응력은 발생되나, 인장 응력(tensile stress)이 발생하지 않는 원통형 주행튜브(10)의 집합체인 선로튜브(11)를 완성한다.
[0054] 이때 개별 주행튜브(10) 내부에 WF보(wide flange beam)형상 자기편(14) 프레임(130)의 플랜지(131)로 주행튜브(10) 안쪽 내부 음정현파((陰正弦波, negative sinusoidal) 내벽을 보강함으로써 선로튜브 외피(15)와 바깥층(face)을 형성하게 되며, 구조적으로 다중샌드위치보(multiple sandwich beam, MSB)기능의 구조물로 동일체적 대비 편평관보다 월등한 인장, 비틀림, 굽힘, 및 압축 강도를 시현하고자 하는 것이다.
[0055] 상기 다중 주행튜브(10)들을 상호간 결합할 때 마름모꼴 쐐기인 마름쇠(✦)로 간단히 결합하거나 물결모양 양정현파 톱니로 맞물림면(咬合平面, bite plane)으로 자동체결(self-locking) 효과를 거둘 수 있어 튜브간 결합을 위한 볼트나 용접 등의 부가 장치나 공정을 제거함으로써 튜브 제조공정이 간소화되고 진공 자기부상 이동체 시스템 선로의 제조비용과 구조의 복잡성이 크게 감소된다.
[0056] 상기 다중샌드위치보(MSB)의 기능을 갖는 양정현파 주름관(101) 형태의 주행튜브(10)의 집합체인 선로튜브(11)는 경량, 고강도(high-strength) 및 고강성(high-rigidity)의 특성을 갖고 있으며, 진공 자기부상 이동체인 튜브셔틀(20)의 초고속 주행에 따른 진동이나 섭동으로 생성되는 불요파 에너지와 지진발생시 P파와 S파의 파동에너지를 견디는 내진강도를 가지는 구조와 형상으로 안정적인 시스템 운영이 가능하게 된다.
[0057] 도4는 보조채움관(12) 단면도로, 주행튜브(10)와 선로튜브 외피(15) 사이의 공간(12A, 12B)과 각 주행튜브(10)간 빈 공간(12C)에는 각 튜브간 전단응력의 분산과 굽힘 강도 향상을 위해 보조채움관(12)을 삽입할 수 있다. 상기 보조채움관(12)은 선로튜브 외피(15)의 두께를 1t라 할 때, 외경 반지름 5t 이상 고강도 재질의 PVC 보조채움관(12)을 삽입하되, 헬리컬튜브 양정현파 주름관(120)과 PVC 편평관(121)을 삽입하여 재료와 형상이 각기 다른 혼성(hybrid)튜브로 선로튜브(11)를 제조하여 합성보(composite beam)인 샌드위치보의 특성을 더욱 강화시키는 것이 바람직하다.
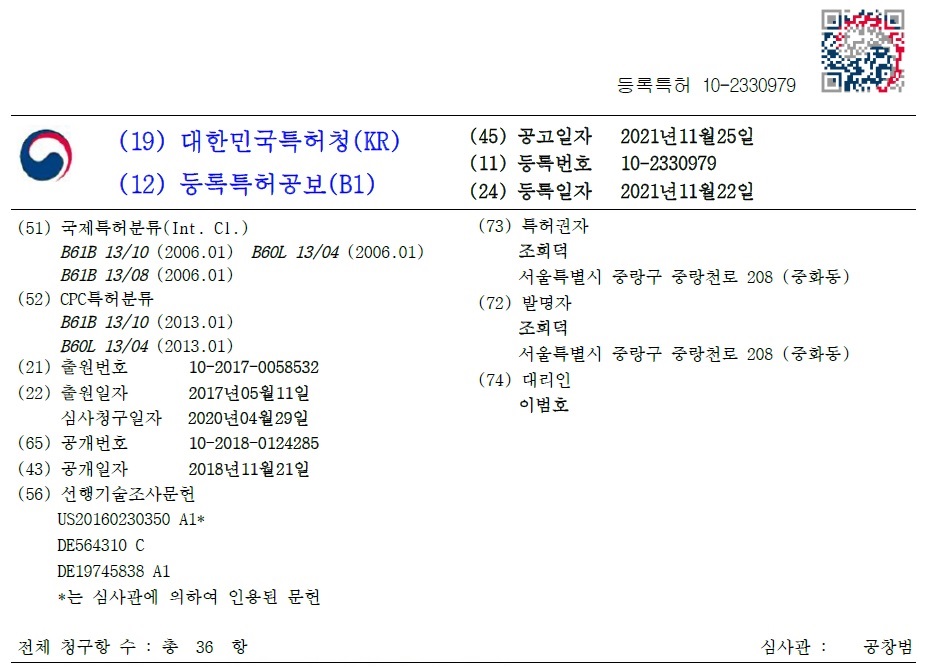
[0058] 도 5는 주행튜브 삼상궤도(13)의 단면도이다. 도6은 상기 도의 A부분 확대도이며, 도 7은 상기 삼상궤도(13) 즉 상기 A 부분의 상세 사시도이다. 도 5내지 도 7을 참조하여 설명하면, 궤도의 위치는 주행튜브(10)에 내접하며 밑변이 수평선과 평행인 정삼각형의 꼭짓점, 즉 주행튜브(10)의 단면의 중심을 원점으로 하고 상기 삼각형은 반지름을 r이라고 할 때 이 극좌표로 (r, π/2), (r, 7π/6), (r, 11π/6) 지점의 3개 지점에 안치되는 기술 방식을 채택할 수 있다. 이러한 표기법은 앞에서도 설명한 바 있지만 이하에서 계속하여 주행튜브 내의 궤도 위치 등 상대적 위치를 나타낼 때 상기 극좌표 표시에서 r을 생략하고 각도를 라디안으로 표기하기로 한다. 예를 들어 (r, π/2), (r, 7π/6), (r, 11π/6)의 3개 지점은(π/2, 7π/6, 11π/6)와 같이 나타낼 수 있는 것이다.
[0059] 상기 삼상궤도(13)의 형상은 WF보(wide-flange beam)의 플랜지(flange)와 웨브(web)를 영구자석 집합편인 자기편(14) 프레임에 상응하는 구조물로 채택하면, 전단응력이 웨브(133, 135) 중립축과 수직면에서만 일어나고 측면 좌굴에 대한 큰 안정성을 보이는 WF보의 특성을 자기부상 이동체 시스템에 활용할 수 있다.
[0060] 도8은 불연속(dashed) 형상 디지털 궤도의 형상을 보여주는데, 튜브셔틀(20)의 주행튜브(10)내 주행에 대해 1m 단위 거리를 거동하는 수치제어(numerical control, NC)에 필요한 치(齒)의 역할과 함께 초음속 혹은 아음속 주행에 필수적인 진공튜브 상태 유지를 위한 진공 차단벽(37)을 빈 공간에 설치하는 한편, 장거리 및 초장거리 선로튜브(11) 건설에 수반되는 자재비 절감이 가능하게 된다.
[0061] 도 9는 영구자석 자동체결 형상을 보여주고 있으며, 도 10은 자기편 프레임 형상과 영구자석 배치를 보여 주며, 도 11은 자기편 영구자석 배열도이다.
[0062] 이때 자기편 프레임(130)인 웨브(133, 135)와 플랜지(132, 134)의 연결부는 응력이 위험하게 커지는 응력집중을 방지하기 위해 필릿(fillet, 둥근 모)(138)을 구비하여 돌출웨브(135)와 두 개 자기부상편(144) 플랜지(134)의 전단흐름 합력이 아랫방향 웨브(133)로 전달된 후 하부 플랜지(131, 132)를 통하여 주행튜브(10)와 보조채움관(12) 및 선로튜브(11)로 환류 되도록 한다.
[0063] 또한 매립공(137)에 수납하는 영구자석 자기편(14)은 산화철을 주성분으로 하는 세라믹 제품으로 고온과 장기간 사용에도 산화문제가 발생되지 않아 화학적으로 매우 안정적이고, Nd계 희토류 영구자석에 대비하여 월등한 가격 경쟁력을 갖는 페라이트(Hard Ferrite) 계열의 영구자석을 채택하여 장거리 혹은 초장거리 선로튜브(11) 구축의 경제성을 확보하게 한다.
[0064] 본 발명의 삼상궤도(13) 자기편(14)의 영구자석은 도넛(doughnut) 혹은 솔레노이드 형상의 링형 영구자석(140)을 채택하면, 기하구조에 따라 원통 대칭성에 의해서 솔레노이드 내부의 자기장의 세기는 일정하게 되며, 자연스럽게 솔레노이드 외부와 내부의 대칭성이 깨어져 솔레노이드 내부쪽으로 더 높은 자속밀도와 자속에너지 밀도를 얻을 수 있고 영구자석 재료의 절감이 가능하게 된다.
[0065] 상기 자기편(140)의 하부 플랜지(131, 132)는 주행튜브(10)를 한 겹 더 보강하여 내벽층(face)을 형성함으로써 다중샌드위치보(MSB)의 기능을 증배하는 효과가 발생하며, 전체 튜브의 하중과 자기부상 이동체 운행에 따른 전단응력을 주행튜브(10) 전체면에 고르게 분산 환류하여 인장, 비틀림, 굽힘, 압축강도를 한층 더 강화함으로써, 극한하중 또는 허용하중 보다 낮은 응력상태에 반복적으로 노출되어 발생하는 파단현상인 피로파괴(fatigue failure)를 예방할 수 있게 된다.
[0066] 도 12는 보조궤도와 보조바퀴의 단면도로서, 오목형(凹)홈 형상의 보조궤도(auxiliary track)(16)를 보여주고 있으며, 또한 튜브셔틀(20)에 구비되는 볼록(凸)형 보조바퀴(auxiliary wheel)(26)의 궤도로 튜브셔틀의 ‘활주주행’ 모드를 지원한다. 이는 튜브셔틀(20) 자체 중력에 의한 마찰력으로 출발 및 도착이나 비상 시 혹은 여객, 화물포트, 정비기지 등 저속운행 구간에서, 튜브셔틀(20) 전자기견인편(245)에 의한 선형 스테핑 모터의 견인력과 보조바퀴(26)의 ‘활주주행’ 으로 생성되는 견인력의 이중주행모드 운행으로 가속력을 추가하여 관성력(inertial force)을 증대하고 코깅토크 극복과 부하 균등화(load balance) 및 정차 혹은 격납 시 브레이크 모드 등으로 활용할 수 있게 한다.
[0067] 상기 보조궤도(auxiliary track)(16)는 별도 궤도를 부설하는 것이 아니라 주행튜브(10) 내부 정삼각형 꼭짓점에 안치되는 WF보(wide-flange beam)형 프레임(130)의 하부 플랜지(flange)(131)에 오목(凹)형 홈의 보조궤도(16)를 구비한 후 1m 단위로 연속하여 취부하고 쐐기(168)로 조립함으로써 완결되어 진다.
[0068] 바람직한 보조궤도(16) 형상을 도 12와 도 13을 참조하면, 주행튜브(10) 내벽 플랜지(131)에 3개 음정현파 오목(凹)형 홈(◡◡◡)의 골(161)과 마루(162)에 더하여 좌우로 돌출되는 턱 혹은 가이드(163)로 볼록(凸)형 홈(◠)을 추가 형성되는 볼록오목형(凸凹) 홈(◠◡◡◡◠)을 플랜지(131)에 배치하여 나타나는 π/3 원호 길이의 2 궤도(2 track)를 보조궤도(16)의 궤간(139)으로 삼는다.
[0069] 도14는 삼상궤도(13) 프레임의 결합 단면도로, B(7π/6) 궤도 좌측 π와 C(11π/6) 궤도 우측 2π 및 A(π/2)궤도 좌측 2π/3와 우측 π/3에 3개 골(161)과 2개 마루(162)를 구비하면 정육각형 꼭짓점(π/3, 2π/3, π, 4π/3, 5π/3, 2π) 6개소에 총 18개의 지지 요철부(161, 162)를 확보할 수 있어 양정현파 주행튜브(10)와 WF보 형상 삼상궤도(13) 프레임을 등간격으로 밀결합하여 미끄럼을 방지할 수 있다.
[0070] 도15는 충전포스트 사시도로, 여객 또는 화물 포트나 셔틀, 정비 기지 등 셔틀 정차장소 주행튜브 삼상궤도(13)의 1m 단위 프레임의 자기견인편(145) 프레임인 돌출웨브(135)를 세로방향으로 늘린 확장형 충전 포스트(136)에 변환코일부(146)와 셔틀 감지센서 등을 부가하여 튜브셔틀(20) 진입시 3상 교류전력 급전(147)과 자동 무선충전(inductive charging) 모드로 운영하여 에너지 절감과 셔틀 가동률을 향상시킬 수 있다.
[0071] 도16은 강화튜브 단면도로, 지진이 빈발하는 단층대와 대심해 구간 및 타 선로와 접속이 요구되는 교차형스위치(XoS)(32)가 구비되는 스위칭튜브(31)와 같은 특수구간은 상기 기본형 선로튜브(11) 형상과 기술적 제원을 일부 변경하여 보강한 강화튜브(18)를 안출하여 최적의 튜브 선로건설 솔루션이 필요하다.
[0072] 상기 강화튜브(18)는 궤도간 교차형스위치(XoS)(32)를 구비하여 튜브 혹은 선로간 트래픽을 교환하는 표준 분기선로의 스위칭튜브(31)와 높은 수압의 해구나 해령과 같은 대심해 구간과, 어선조업 해역과 선박통행이 빈번한 주요항로 통과구간 등은 높은 수압극복과 선박닷 등에 의한 튜브보호와 전단응력 및 굽힘 응력(bending stress) 증대를 위해 선로튜브 외피(15)에 양정현파 주름관(101)과 편평관 외피(15)로 한 겹 더 보강하는 강화튜브(consolidated tube)(18)를 채택한다.
[0073] 도17은 100m 단위 표준 선로튜브(11) 혹은 강화튜브(18)의 튜브접속부(17)를 예시하며, 열수축형 너트방식을 채용하여 주행튜브(10) 진공유지를 위한 기밀성과 수중에서의 수밀성을 확보하되, 구체적으로 튜브 양단 외피(15)부분에 각각 2m 볼트 체결부(171)를 형성하고, 4m 열수축형 너트(172)의 지름을 볼트 체결부(171)보다 약간 크게 하여 회전시켜 체결한 후 전열기 등으로 가열하여 압착·밀봉하고, 너트 양단에는 추가적 기밀성과 수밀성 확보를 위한 2중오링(173)을 추가한 후 고강도 재질의 5m 보호함체(174)를 덧대어 조립한다. 이때, 선로튜브(11) 혹은 강화튜브(18) 접속부인 보호함체(174)에는 수중교각(53)이나 튜브앵커(52) 혹은 튜브 평형추(51) 연결공법으로 선로튜브(11) 혹은 강화튜브(18)의 부력(buoyant force)을 상쇄시키는 한편, 튜브(11, 18, 182)의 하중을 지지하고 지진파(P파, S파, 표면파 등)에 의한 진동 에너지를 흡수하여 대지로 환류시키는 튜브댐퍼(tube damper)(19)를 구비한다.
[0074] 도18은 면진(免震), 제진(制震) 대책인 상기 튜브댐퍼(19)를 예시하며, 스프링의 고유진동수(natural frequency)를 상이하게 하고 각기 반대방향 턴(turn)으로 위상(phase)을 반전시켜 소멸간섭과 감쇠진동(damped oscillations)의 효과가 나타나는 스프링을 묶음형으로 배치한 스프링 뭉치인 튜브댐퍼(19)를 튜브(11, 18, 30, 31, 36) 접속부(17) 보호함체(174)에 취부하여 강제가진인 지진이나 자기부상 이동체의 운행에 수반되는 진동을 감쇠시킨다.
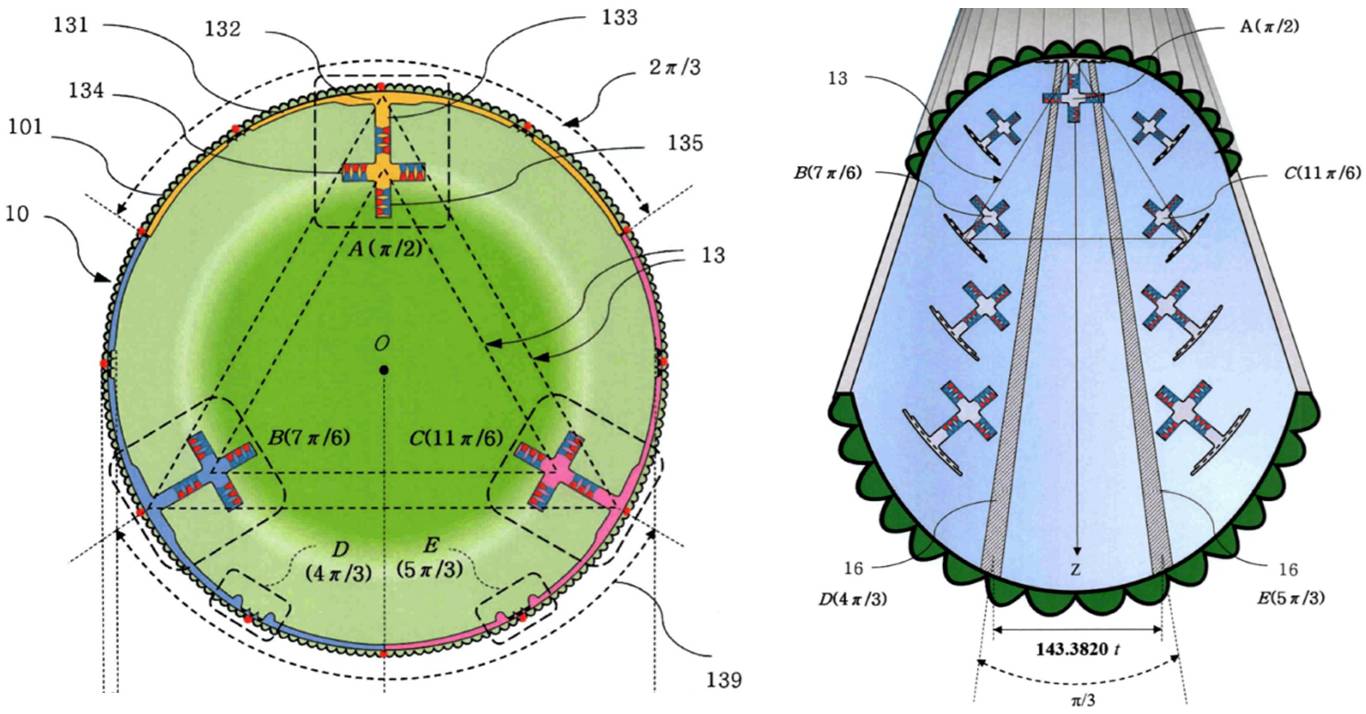
[0075] 도 19는 튜브 셔틀(20)의 사시도이며, 도 19b는 상기 튜브 셔틀(20)의 측면도이며, 도 20은 상기 튜브 셔틀(20)의 단면도이다. 상기 튜브셔틀은 양정현파 주름관의 주행튜브(10) 내부를 초음속 혹은 아음속으로 주파하는 자기부상 이동체로, 외부형상은 원통 실린더형으로 구성되고 삼상궤도(13)인 주행튜브(10) 자기편(14) 철(凸)에 대응하는 정삼각형 꼭짓점ABC 3개소에 매립형 전자기편(24) 요(凹)를 배치하여 주행튜브(10)와 이동체 체적을 최소화 혹은 생력화(省力化)하는 수단을 포함한다. 이동체인 상기 튜브셔틀(20) 본체 재료는 철 대비 40% 경량화가 가능한 알루미늄 혹은 마그네슘 합금강의 고강도 프레임으로 정삼각형 꼭짓점ABC 3개소에 재료역학적으로 완전 응력보(fully stressed beam)인 포물면(230)의 관통 홈을 갖는 전자기편 뱅크(23)를 구성하고, 알루미늄 혹은 탄소섬유복합재(CFRP) 등의 초경량 소재의 코어(250)와 내외 편평판(25)으로 실린더형 몸체를 구성하면, 구조와 재료 역학적인 특성이 원형단면을 갖는 폐구조물(closed structure)인 압력용기(pressure vessel)로 비행기 또는 압축공기 탱크와 동일한 특성을 갖게 된다.
[0076] 상기 튜브셔틀(20)의 기본형상은 정삼각형 삼상궤도(13)와 원형 주행튜브(10) 및 원통형 튜브셔틀(20)로 삼각형의 기하학적 특성에 따라 2궤도 단상방식에 비해 50%의 재료가 할증되나 역학적 특성인 부상력과 견인력 및 내진동 특성이 √3배 증강되며 각 궤도에 있어 1/√3의 부상력과 견인력만으로 2궤도 단상부상과 동일한 특성을 가지게 되므로 소용량 영구자석을 활용하는 삼상궤도(3 phase track) 이동체 시스템을 구현할 수 있다.
[0077] 구체적으로 도21의 정삼각형 꼭짓점 A자기편(π/2)을 기준으로 살펴보면 π, 2π 방향의 양 자기 부상편(244)은 xy축의 수평과 수직방향 자기 부상력을 튜브셔틀(20) 원주와 길이(z축) 방향으로 안과 밖에서 구속하고, π/2 방향의 자기균형편(243)과 3π/2방향의 전자기견인편(245)은 튜브셔틀(20) 진행방향(z축)으로 좌우측에서 구속하는 기하학적 형상을 갖게 되어 자기 부상력과 견인력의 자기장 벡터B를 원점으로 평행이동하면 무게(gravity)중심과 모멘트(moment)의 중심점이 xyz축 3차원 방향 원점O(0, 0, 0)에 집중되어 구속됨을 알 수 있다.
[0078] 상기 전자기편(24)은 도 21의 전자기편뱅크(23) 단면도에서 예시하는바와 같이 튜브셔틀(20) 본체 정삼각형 꼭짓점ABC(π/2, 7π/6, 11π/6) 3개소에 재료역학적으로 완전 응력보인 포물면(230)의 관통된 홈을 갖는 전자기편뱅크(23) 혹은 트레인을 구성하여 튜브셔틀의 전단응력을 최대화하고, 반사 망원경이나 파라볼라 안테나와 같이 초점부분에 매립형 전자기편(24)요(凹)를 배치한 후 적층 규소강판 요크부(231)를 포물면에 취부하여 주행튜브 자기편(14)과 셔틀 전자기편(24)에서 발생하는 전자기파를 포물면에서 반사시켜 차폐하는 구조로 셔틀 내부로 유입되는 전자파를 최소화시킨다.
[0079] 튜브셔틀 매립형 전자기편(24)요(凹) 배치형상을 정삼각형 꼭짓점 A를 기준으로 도22를 참조하여 살펴보면, 자기부상편(244)과 자기균형편(243)은 1m 단위 등간격으로 1번~12번에 영구자석 집합편(240)을 전자기뱅크(23)요(凹)에 배치하되 2번과 11번 자기편은 능동제어전자기편(27)으로 대체되고, 1번~12번 전자기편 편간(片間) 공간의 단위미터 위치 11개소에는 전자기견인편(245)과 회생제동 혹은 전력회생 브레이크 기능과 고속무선 충전기능의 변환코일부(28)가 안치되며, 셔틀 선두와 꼬리부분에는 유선형의 전자기 날개(wing)(22)와 1~12번 전자기편의 빈 공간에 전자기 방사판(29)을 구비한다.
[0080] 도 23은 전자기 날개의 형상을 보여 주며, 도 24는 반구형 해치부를 보여준다. 도23, 24의 전자기날개(22)는 셔틀 선두와 꼬리부분의 반지름(RS) 138.3820t의 반구(半球)형 해치부(hatch)(21)와 전자기편의 0.3333m 빈 공간에 주행튜브(10)의 ✛형 자기편(14)과 π/4 위상각(θ)을 갖는 X자 유선형 전자기 날개(wing)(22)로 자속 분리기(flux splitter)로 역할을 하게 된다. 상기 전자기날개(22)의 자속분리와 압축기능은 내연기관이나 로켓엔진의 터보차저(turbocharger)와 유사한 기능으로 유선형 날개표면을 자화하거나 얇은 냉간압연강판(cold-rolled steel plates) 혹은 전자강판(magnet steel plates)을 취부하면 튜브셔틀(20) 거동시 주행튜브 자기편(14)의 자속(flux)을 각 사분면 45도 각도로 쪼개어 분할(split)하고 유선형 날개의 플럭스포일(flux foil)(220)과 전자기 방사판(29)의 표피효과에 의해 셔틀의 주행 속도에 비례하여 자속흐름이 압축된다.
[0081] 도 25는 교차형스위치(XoS)(32)가 안치되는 스위칭튜브(31)의 단면도로, 1개 선로튜브(11)와 2개 회전튜브(30)가 하나로 결합되는 3중 튜브의 묶음형 튜브(bundled tube) 형상을 갖게 되며, 동심원 회전튜브(30)의 0번 튜브 위치에 각 회전튜브(30)의 좌측 2번 튜브 혹은 우측 5번 튜브를 배치하여 상층부에 6개, 중층부에 7개, 하층부에 6개 주행튜브(10)가 구비되는 6·7·6 구조를 갖게 된다.
[0082] 도 26은 강화 스위칭튜브 단면도로, 상기 스위칭튜브(31) 외피(312)에 양정현파 주름관(311)과 편평관 외피(312)를 한 겹 더 보강하는 1차 강화 스위칭튜브(1st consolidated tube)(181)를 나타낸다.
[0083] 도 27은 경사튜브의 형상을 보여 준다. 경사튜브(36) 구현방안은 선로튜브(11)의 상중하층 주행튜브(10)간 접점의 마름쇠꼴 쐐기의 높이를 순차적으로 상향 또는 하향시키고 그 이격공간을 제1실시예의 보조채움관(12)과 폼(foam)재(129)로 충진한 후 y축에 초점이 있는 타원형의 경사튜브로 구현할 수 있다.
[0084] 도 28에 예시하는 표준 접속로 모델은 고속도로 인터체인지와 일반도로 로터리 시설물의 설계개념을 궤도 트래픽에 적합한 방식으로 개선하여 4개 회전튜브(30)와 본선 선로튜브(11) 접점부분에 궤도 굴절편인 교차형(交叉型) 스위치(32)를 구비한 스위칭튜브(31)로 구성되는 표준 접속로 모델을 안출하여 7중 선로튜브(11)의 상호분기와 접속을 무정차, 무대기로 설계하여 초고속 운행에 필요한 기능을 지원한다.
[0085] 도 29는 2차 회전튜브 형상도이며, 도 30은 대원 회전튜브 형상도이고, 도 31은 원점 회전튜브 형상도이다. 교차(cross)점의 4개 회전튜브(30)는 도넛(doughnut)형으로 본선 접점의 교차형스위치(XoS)(32)가 안치된 스위칭튜브(31)와 함께 시설하여 분기(outbound)와 합류(inbound)의 2단계 스위칭으로 각기 직각방향의 우회전 트래픽을 처리하고, 좌회전 트래픽은 xy축 교차점 통과 후 스위칭튜브(31)의 본선분기(outbound)와 타선 스위칭튜브 합류(inbound) 교차형스위치(XoS)(32)를 경유하는 P형 회전(P turn)의 2단계 스위칭으로 좌회전을 완성한다.
[0086] 도 32a, 도 32b, 도32c 는 교차형스위치(XoS)(32)의 배치도와 동작도이다. 도 32d는 3단 교차형스위치(XoS)의 단면도와 확대도이며, 도 32e는 3단 교차형 스위치의 동작 모식도이다.
[0087] 2 세그먼트형 굴절편인 교차형스위치(XoS)(32)의 작동원리를 도 32를 참조하여 살펴보면 연접하는 타 궤도와의 스위칭 회로구성을 출향(出向)측 굴절편(324)에서 1/2 좌우(↖↗)로, 입향(入向)측 굴절편(325)에서 1/2 좌우(↘↙)로 굴절시켜 스위칭회로를 구성하며, 이때 굴절되지 않는 연접궤도 내측궤도(326)도 좌우로 동시에 굴절(↖↗,↘↙)시켜 스위칭 공간을 마련하며, 스위칭 굴절편(324, 325, 326)의 작동은 액추에이터(actuator)(320)를 삼상궤도(13)에 취부하여 중앙과 권역 관제소의 인공지능(AI) 프로그램으로 통제한다. 표준접속로 모델의 핵심 요소기술인 교차형스위치(XoS)의 궤도 굴절편(324, 325, 326)은 100m 단위 주행튜브(10)를 3개 연결한 300m 표준 단위길이를 갖고 수평으로 연접하는 선로튜브(11)와 회전튜브(30)를 결합한 일체형의 묶음형 스위칭튜브(31)를 구비하여 분기(outbound)와 합류(inbound) 트래픽을 상호교차 방식으로 1개 교차형스위치(XoS)(31)에서 통합하여 처리할 수 있는 개선점을 갖게 된다.
[0088] 도 33은 수직교차형 스위치(vXoS)의 형상도이다. 수직 교차형스위치(vXoS)(34)의 작동을 도 33과 수평방향으로 기동하는 스위칭튜브(31)의 교차형스위치(XoS)(32)를 참조하여 살펴보면, 수직 굴절편(344, 345, 346)이 상하로 기동하여 상하로 연접한 궤도간 트래픽을 상호교환하게 되며, 100m 단위 주행튜브(10)를 2개 연결한 200m 표준단위길이의 수직 스위칭튜브(33) 형상이 바람직하다.
[0089] 이상의 각종 튜브별 특성과 기능의 상이함은 경제성과 장래 확장성을 고려한 최적 솔루션을 안출하기 위한 것으로써, 실제 산업상 이용에 있어 다소간의 변경은 있을 수 있으나 본 발명의 튜브셔틀(20)은 기본선로이자 장거리 수송로인 선로튜브(line tube)(11)를 주행함에 있어, 타원형 경사튜브(ramp tube)(36)를 경유하여 교차형스위치(XoS, vXos)(32,34)가 구비된 스위칭튜브(switching tube)(31)에 진입하고, 스위칭튜브 통과 후 다시 역순으로 경사튜브(36)를 통하여 선로튜브(11)를 주행하는 선로 시스템이 긴요하다.
[0090] 이러한 교차형스위치(XoS)(32)와 1차 회전튜브(30)와 2차 회전튜브(302) 및 원점회전튜브(300)를 조합한 표준접속로 모델은 국제간 노선과 연계하여 대도시내 접속과 기존 저심도 지하철 등과 연계하여 대도시내 교통수요를 흡수하는 격자형 매트로 망으로 자연스럽게 확장할 수 있어 전통적인 교통망을 통신망 특히 인터넷망과 유사하게 확장할 수 있는 솔루션으로 활용할 수 있다.
[0091] 도 34a, 도34b는 진공차단벽의 형상도이다. 장거리 구간인 선로튜브(11) 진공상태 유지를 위해 튜브간 접속부(17)에 진공차단벽(37)과 진공펌프(370)를 구비하여 선로튜브(11) 교차점이나 셔틀 정차장소인 플랫폼 등에 복수 개를 설치하면 구간별 폐색기능 부여로 진공펌프(370) 가동의 효율을 높이고, 선로튜브(11) 파손과 같은 긴급사태 대책(contingency plan)이나 튜브 유지보수 필요시 구간별 폐색과 개방으로 선로튜브(11) 운영효율을 증진한다.
[0092] 선로튜브(11)의 진공차단벽(37)과 진공펌프(370)는 튜브간 접속부(17)에 완전응력보인 포물면결합부(371)를 설치하고 내부 공간에 주행튜브(10) 내경지름인 288.7640t의 차단벽(372)과 구동 액추에이터(373), 진공 감지센서(374), 좌우 2개의 진공펌프(370)와 주행튜브(10) 플랜지(131) 경계면에 기밀유지용 이중오링(double O ring)(375)을 구비하여 주행튜브(10)의 진공상태를 유지한다.
[0093] 이때, 차단벽(372) 구동 액추에이터(373)와 진공펌프(370) 등의 구동전원은 육상구간은 보조채움관(12)을 통해 외부 전력선을 인입하며, 해상구간은 보조채움관을 통해 육지 외부 전력선을 인입하거나 수중교각(53)이나 튜브앵커(52) 등에 해상풍력 혹은 파력발전 시설을 부가한 후 배터리(376)에 충전하여 구동할 수 있도록 튜브망 구축시 설계에 반영함이 바람직하다.
[0094] 본 발명을 실제로 구현하기 위해서는 해상과 육상구간의 튜브건설이 필요하고 해상구간은 강화튜브(18) 구조물의 부력을 고려한 수중교각과 튜브앵커 및 튜브평형추 등 해양구조물과 육상구간은 대심도 터널건설이 요구된다. 본 발명의 7 선로튜브를 육상이 아닌 해저구간에 시공할 경우 튜브 주변의 유체인 바닷물이 작용하는 알짜 힘인 부력(buoyant force)이 튜브의 아랫면을 위쪽 방향으로 미는 힘이 발생하므로, ‘어떤 물체에 작용하는 부력은 그 물체에 의해 밀려난 유체의 무게와 같다’ 는 아르키메데스의 원리(Archimedes’s principle)를 기본요소로 고려하여야 한다.
[0095] 도 35는 튜브 평형추의 형상도이다. 도 36은 튜브 앵커의 형상도이며, 도 37은 수중 교각의 형상도이다.
[0096] 적절한 평형추는 철이나 콘크리트를 활용하여 V바닷물/V튜브 = ρ튜브/ρ바닷물 비례조건에서 튜브길이 100m 단위당 밀도ρ(kg/m³)와 부피가 평형조건을 만족하는, 구형 평형추(51)로 실시예1의 튜브댐퍼(19)와 선로튜브(11)를 보강한 강화튜브(18) 접속부인 보호함체(174) 혹은 연결부(511)에 연결하는 부력(buoyant force)평형추(51) 공법은, 연근해는 물론 해구나 해령과 같은 대심해 구간에 적용하여 수중에 떠있는 평형상태의 튜브건설이 가능함으로써 공사비 절감과 공기단축에 기여할 수 있다.
[0097] 한편 대륙붕과 연근해와 같은 천해구간은 50·100m 단위로 콘크리트 이형 블록인 뿔이 4개 달린 구조물인 테트라포드(tetrapod)(520)를 해저지형 조건에 따라 1~4개 투하하고 강화튜브(18)간 튜브접속부인 보호함체(174)를 튜브댐퍼(19)와 고장력 케이블(523)이나 체인으로 접속하여 부력을 극복하는 튜브앵커(52) 공법을 적용하여 공사비 절감과 공기단축을 도모할 수 있다.
[0098] 구체적으로, 수중교각(53) 공법은 Y형(U+I)의 구조물로 시공하여 튜브댐퍼(tube damper)(19)로 강화튜브(18)와 접속하여 해저화산이나 단층면과 섭입대 등에서 발생하는 지진파(P,S 파)에너지에 의한 진동을 흡수하는 구조물로 대륙붕과 같은 연근해 구간은 100·200·300m 단위로 설치하며 심해구간은 필요시 해저지형의 융기 구간에 설치할 수 있다.
[0099] 도 38은 해상구간 시공선박의 모식도로, 위성항법시스템(GPS)(508)과 해저의 음향송수신기인 트랜스폰더(509) 등에 의한 위치측정 데이터로 선박에 장착된 360도 회전하는 스러스터(505) 자동제어 기능의 자세제어 튜브 시공선박(500)과 수중 건설작업을 수행하는 작업용 로봇팔 혹은 매니퓰레이터(manipulator)(502)를 구비한 잠수정(501)을 건조하여, 데릭(derrick)기중기(504)로 드릴파이프(503)를 해저암반을 천공하여 수중교각(53)을 건설하고, 테트라포드 투하에 의한 튜브앵커(52) 시공과 튜브평형추(51) 연결 및 튜브간 접속 등을 일괄하여 시공하는 공법을 도입한다.
[0100] 상기 시공선박(500)과 작업 잠수정(501)은 각기 2척의 선박이 건설현장 100m 길이 강화튜브(18) 2개를 동시에 시공하여 후미 1튜브 접속 완료 후, 100m 전진하여 앞방향 강화튜브(18) 접속을 위한 수중교각(53) 건설, 튜브앵커(52) 시공과 튜브평형추(51) 연결 등의 시공과 건설을 일괄 완성하는 교차전진 혹은 순차교대 공법으로 공사기간을 단축하며, 공사 완료 이후 선로유지 보수용 선박으로 활용하는 것이 바람직하다.




